Mastering Neural Network - Linear Layer and SGD
The human brain remains one of the greatest mysteries, far more complex than anything else we know. It is the most complicated object in the universe that we know of. The underlying processes and the source of consciousness, as well as consciousness itself, remain unknown. Neural Nets are good for popularizing Deep Learning algorithms, but we can't say for sure what mechanism behind biological Neural Networks enables intelligence to arise.
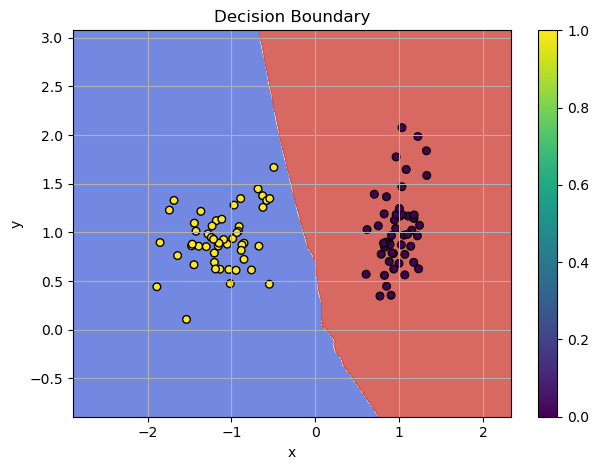
Visualized Boundaries
Check the jupyter notebook¶
What We'll Build¶
In this chapter, we'll construct a Neural Network from the ground up using only Python and NumPy. By building everything from scratch, we'll demonstrate that Deep Learning isn't a black box - it's a system we can fully deconstruct and understand. This hands-on approach will show how the fundamental principles of neural networks can be implemented with minimal tools, demystifying the core concepts that power modern machine learning.
Prerequisites¶
To understand this chapter, I recommend that you to check my previous post about gradient descent: Gradient Descent - Downhill to the Minima. We will use gradient descent to train our first neural network.
The challenge our network is going to solve is the classical linearly separable pattern, which we use as a classification problem. You can check my previous post for more details about the classification problem and the training process: Dive into Learning from Data - MNIST Video Adventure
Training in a Nutshell¶
To train our network, we compute the gradient and update parameters in the direction of the steepest descent, following the negative gradient. If you want to know more about the gradient, you can check my post on why the gradient points upwards and downhill to the minima
In short, the gradient is the most important operation in the training process. We need to follow the negative gradient direction to train our model. Backpropagation is the process of propagating the error backward through the network to update the model's parameters.
The training consists of two main phases:
-
forward: computes the model's output for a given input, storing intermediate values required for gradient computation. -
backward: calculates the derivatives with respect to each parameter using the Chain Rule of Calculus. Gradient are then used to adjust the parameters in the direction that minimizes the loss.
Module¶
To maintain consistency across different components of our neural network, we'll use a base class called Module. This class provides a structure for implementing layers, activations, and other elements.
The Parameter class makes it easy to manage and identify model parameters during optimization. It allows the Optimizer to access and modify parameter data and gradients in a structured way after the forward and backward steps.
Here's the implementation:
from dataclasses import dataclass
@dataclass
class Parameter:
r"""
Represents a trainable parameter in a neural network model.
Attributes:
name (str): The name of the parameter, typically identifying its purpose (e.g., "weights", "biases").
data (np.ndarray): The current value of the parameter, stored as a NumPy array.
grad (np.ndarray): The gradient of the parameter, calculated during the backward pass.
"""
name: str
data: np.ndarray
grad: np.ndarray
class Module:
r"""
A base class for all neural network components.
Provides a consistent interface for forward and backward passes,
and allows for the implementation of common operations like
parameter updates.
"""
def __call__(self, *args, **kwargs):
r"""
Enables the object to be called like a function. Internally,
this redirects the call to the `forward` method of the module,
which computes the model's output for the given input.
Args:
*args: Positional arguments passed to the `forward` method.
**kwargs: Keyword arguments passed to the `forward` method.
Returns:
The output of the `forward` method.
"""
return self.forward(*args, **kwargs)
def forward(self, *args, **kwargs):
r"""
Forward Pass: Compute the model's output for a given input,
accumulating the values required for gradient computation.
"""
raise NotImplementedError
def backward(self, *args, **kwargs):
r"""
Backward Pass: Calculate the derivative of the loss function
with respect to each parameter using the chain rule of calculus.
These derivatives (gradients) are then used to adjust the
parameters in the direction that minimizes the loss.
"""
raise NotImplementedError
def parameters(self) -> List[Parameter]:
r"""Returns all trainable parameters of the module."""
return []
def zero_grad(self):
r"""
Resets the gradients of all parameters in the module to zero.
This is typically done at the start of a new optimization step
to prevent accumulation of gradients from previous steps.
"""
for param in self.parameters():
param.grad.fill(0)
Weights initialization¶
Before implementing the Linear Layer, it's essential to consider the importance of weight initialization! Proper weight initialization can significantly affect the performance of your neural network. For more details on this topic, you can refer to Weight Initialization Methods in Neural Networks.
In short, the choice of initialization depends on the activation function used in your network:
- LeakyReLU: The best weight initialization for this activation function is the Leaky He method.
- Sigmoid: For Sigmoid activation, the Xavier-Glorot method works best.
To simplify the implementation of the Dense Layer, we can leverage the parameter, which handles different initialization methods effectively.
import numpy as np
from typing import Literal
# Define a custom type alias for initialization methods
InitMethod = Literal["xavier", "he", "he_leaky", "normal", "uniform"]
def parameter(
input_size: int,
output_size: int,
init_method: InitMethod = "xavier",
gain: float = 1,
alpha: float = 0.01
) -> np.ndarray:
weights = np.random.randn(input_size, output_size)
if init_method == "xavier":
std = gain * np.sqrt(1.0 / input_size)
return std * weights
if init_method == "he":
std = gain * np.sqrt(2.0 / input_size)
return std * weights
if init_method == "he_leaky":
std = gain * np.sqrt(2.0 / (1 + alpha**2) * (1 / input_size))
return std * weights
if init_method == "normal":
return gain * weights
if init_method == "uniform":
return gain * np.random.uniform(-1, 1, size=(input_size, output_size))
raise ValueError(f"Unknown initialization method: {init_method}")
For a comprehensive overview of weight initialization techniques, visit Weight Initialization Methods in Neural Networks.
Forward Mode for Linear Layer¶
At layer
Here,
The single step
where
In a neural network, the input data undergoes a series of transformations layer by layer, resulting in the final output:
Using functional composition, the deep neural network is compactly expressed as:
The forward pass computes these transformations sequentially, storing intermediate values for use during the backward pass.
We can implement the backbone of the Linear layer and its forward method based on the equations.
class Linear(Module):
def __init__(
self,
input_size: int,
output_size: int,
init_method: Literal["xavier", "he", "he_leaky", "normal", "uniform"] = "xavier"
):
self.input: np.ndarray = None
self.weights: np.ndarray = parameter(input_size, output_size, init_method)
self.d_weights: np.ndarray = np.zeros_like(self.weights)
self.biases: np.ndarray = np.zeros((1, output_size))
self.d_biases: np.ndarray = np.zeros_like(self.biases)
def forward(self, x: np.ndarray) -> np.ndarray:
self.input = x
x1 = x @ self.weights + self.biases
return x1
Backward Mode for Linear Layer¶
In backpropagation, the goal is to compute the gradient of the loss function
This is achieved by applying the chain rule of calculus, which allows the gradients to be propagated backward from the output layer to the input layer.
In calculus, the chain rule describes how to compute the derivative of a composite function. For two functions
In neural networks, the loss function
To compute the gradient
We can express the gradient flow through the network as:
The chain rule propagates gradients backward: starting with the gradient of the loss (
This structured approach ensures that gradients are correctly computed and used to update all parameters.
In the backward method, we compute the gradients of the loss with respect to the network's parameters. This is done by using the gradients of the output (denoted as d_out) and backpropagating them through the network using the chain rule. Essentially, the backward method applies the chain of gradients to adjust the weights and biases, improving the network's performance over time.
The gradient vector with respect to the parameters (weights
Partial Derivative with Respect to Weights
The partial derivative of the affine transformation
Why Do We Have
The derivative
- Each row of
- Mathematically,
Intuition Behind
- Transpose Role:
- Gradient Flow: Each column of
By the chain rule we need to use the gradient of the loss with respect to the output of the current layer
This is efficiently computed in matrix form as:
self.input.T is the transpose of the input matrix d_out represents the gradient of the loss with respect to the output of the current layer,
Partial Derivative with Respect to Biases
The partial derivative of the affine transformation
In backpropagation, the chain rule is used to propagate gradients from the loss function
Start with the total derivative of the loss with respect to the bias:
Substituting, we get:
In the case of a batch of data, the bias gradient accumulates contributions from all samples in the batch. This is implemented as:
np.sum(d_out, axis=0, keepdims=True) computes the sum of gradients across all samples in the batch, resulting in a single gradient vector for the biases. keepdims=True ensures that the resulting array maintains the correct dimensionality shape (1, output_size) for compatibility with subsequent computations.
Finally, the gradient of affine transformation is defined as:
Here's the full implementation of the Linear layer:
class Linear(Module):
r"""
A linear layer in a neural network that performs an affine transformation
followed by the addition of a bias term. It is the core building block
for many neural network architectures.
Attributes:
input (np.ndarray): The input to the linear layer, used during the forward and backward passes.
weights (np.ndarray): The weights of the linear transformation, initialized using the specified method.
d_weights (np.ndarray): The gradients of the weights with respect to the loss, computed during backpropagation.
biases (np.ndarray): The biases added during the linear transformation.
d_biases (np.ndarray): The gradients of the biases with respect to the loss, computed during backpropagation.
"""
def __init__(
self,
input_size: int,
output_size: int,
init_method: InitMethod = "xavier"
):
r"""
Initializes a Linear layer with the given input size and output size.
The weights are initialized using the specified method (e.g., Xavier, He, etc.),
and biases are initialized to zeros.
Args:
input_size (int): The number of input features to the layer.
output_size (int): The number of output features from the layer.
init_method (InitMethod): The initialization method for the weights (default is "xavier").
Attributes:
input (np.ndarray): Stores the input to the layer during the forward pass.
weights (np.ndarray): The weights for the linear transformation.
d_weights (np.ndarray): The gradients for the weights, calculated during backpropagation.
biases (np.ndarray): The biases for the linear transformation.
d_biases (np.ndarray): The gradients for the biases, calculated during backpropagation.
"""
self.input: np.ndarray = None
self.weights: np.ndarray = parameter(input_size, output_size, init_method)
self.d_weights: np.ndarray = np.zeros_like(self.weights)
self.biases: np.ndarray = np.zeros((1, output_size))
self.d_biases: np.ndarray = np.zeros_like(self.biases)
def forward(self, x: np.ndarray) -> np.ndarray:
r"""
Computes the forward pass of the linear layer. The input is multiplied by
the weights and biases are added, producing the output.
Args:
x (np.ndarray): The input to the layer, typically the output of the previous layer.
Returns:
np.ndarray: The output of the linear transformation (after applying weights and biases).
"""
self.input = x
return x @ self.weights + self.biases
def backward(self, d_out: np.ndarray) -> np.ndarray:
r"""
Computes the backward pass for the linear layer, calculating the gradients
with respect to the weights and biases, and the gradient of the input
to be passed to the next layer.
Args:
d_out (np.ndarray): The gradient of the loss with respect to the output of this layer.
Returns:
np.ndarray: The gradient of the loss with respect to the input of this layer,
which will be passed to the next layer.
"""
# Compute gradients for weights and biases
self.d_weights = self.input.T @ d_out
self.d_biases = np.sum(d_out, axis=0, keepdims=True)
# Chain rule!
layer_out = d_out @ self.weights.T
return layer_out
def parameters(self):
r"""
Retrieves the parameters of the linear layer, including weights and biases,
along with their corresponding gradients. This method is typically used for
optimization purposes during training.
Returns:
list[Parameter]: A list of `Parameter` objects, where each object contains:
- `name` (str): The name of the parameter (e.g., "weights", "biases").
- `data` (np.ndarray): The parameter values (e.g., weights or biases).
- `grad` (np.ndarray): The gradients of the parameter with respect to the loss.
"""
return [
Parameter(
name="weights",
data=self.weights,
grad=self.d_weights
),
Parameter(
name="biases",
data=self.biases,
grad=self.d_biases
),
]
Loss¶
To check the accuracy of the model, we compare the predicted output,
For a classification problem with 2 classes, we deal with a Binary Classification Task, and the most effective loss function in this case is the Binary Cross-Entropy Loss.
The binary cross-entropy formula for two classes (0 and 1) is:
Binary Cross-Entropy derivative
For more details, check out my post on Cross-Entropy.
The complete implementation of the BCE module:
import numpy as np
class BCELoss(Module):
def forward(
self, pred: np.ndarray, target: np.ndarray, epsilon: float = 1e-7
) -> np.ndarray:
loss = -(
target * np.log(pred + epsilon) +
(1 - target) * np.log(1 - pred + epsilon)
)
# Average the loss over the batch size
return np.mean(loss)
def backward(
self, pred: np.ndarray, target: np.ndarray, epsilon: float = 1e-7
) -> np.ndarray:
grad = (pred - target) / (pred * (1 - pred) + epsilon)
# you should not average the gradients!
# instead, you should return the gradient for each example,
# as gradients represent how much the loss changes with
# respect to each individual prediction.
return grad
For more details, check out my post on Cross-Entropy
Sigmoid¶
The sigmoid activation function is defined as:
The derivative of the sigmoid activation function is:
Check out this post to learn more about sigmoid, logits, and probabilities.
The Sigmoid class inherits from Module and implements both the forward and backward methods for the sigmoid activation function. The forward method applies the sigmoid function to the input data, and the backward method computes the gradient required for the backward pass during model optimization (training).
class Sigmoid(Module):
r"""Sigmoid activation function and its derivative for backpropagation."""
def forward(self, x: np.ndarray):
# Apply the Sigmoid function element-wise
self.output = 1 / (1 + np.exp(-x))
return self.output
def backward(self, d_out: np.ndarray):
# Derivative of the Sigmoid function: sigmoid * (1 - sigmoid)
ds = self.output * (1 - self.output)
return d_out * ds
d_out represents the gradient from the output of the current layer, to propagate errors backward through the network.
Here's how the Sigmoid class can be used in practice:
# Example inputs
input_x = np.array([0.5, 1.0, -1.5])
# Initialize the Sigmoid activation
activation = Sigmoid()
# Forward pass
output = activation(input_x)
print("Output of Sigmoid:", output)
# Backward pass
d_out = np.array([0.1, 0.2, 0.3]) # Example gradient from next layer
gradient = activation.backward(d_out)
print("Gradient of Sigmoid:", gradient)
Stochastic Gradient Descent (SGD)¶
In training neural networks, Stochastic Gradient Descent (SGD) is one of the popular optimization algorithms. It aims to minimize the loss function
The key idea behind SGD is that, rather than using the entire dataset to compute gradients (as in batch gradient descent), we use only a single data point or a mini-batch to compute the gradients and update parameters. This makes the optimization process faster and more scalable.
In SGD, the parameter update rule is given by:
Where
To help accelerate convergence, momentum is introduced. It helps smooth the updates and avoid oscillations by incorporating the previous gradient into the current update. First we compute the Momentum:
The update rule for our position becomes:
For more datils check my post: Gradient Descent Ninja with Momentum
Implementation:
class SGD:
def __init__(
self,
lr: float = 0.01,
momentum: float = 0.0,
):
"""
Initializes the Stochastic Gradient Descent (SGD) optimizer.
- **Learning Rate (`lr`)**: Controls how big the updates are. A larger learning rate might result in faster convergence but could also cause instability.
- **Momentum (`momentum`)**: Helps accelerate the gradient descent process by adding inertia to the parameter updates. This makes the algorithm more efficient by using past gradients to update parameters in a more "smooth" way.
The optimizer aims to update the model's parameters in a way that reduces the loss function, allowing the model to improve its performance over time.
Args:
lr (float): Learning rate for updating the model's parameters.
momentum (float): Momentum for accelerating gradient descent.
"""
self.lr = lr
self.momentum = momentum
self.velocity = {} # Store momentum for each parameter
def step(self, module: Module):
"""
Performs a single update step on the parameters using the gradients.
Args:
module (Module): The module (e.g., layer) whose parameters are being updated.
"""
for param in module.parameters():
param_id = param.name
# Initialize velocity if not exists
if param_id not in self.velocity:
self.velocity[param_id] = np.zeros_like(param.data)
grad = param.grad.copy() # Make a copy to avoid modifying original
# Update with momentum
self.velocity[param_id] = self.momentum * self.velocity[param_id] - self.lr * grad
# Update parameters
param.data += self.velocity[param_id]
Example:
# Initialize the SGD optimizer with custom settings
optimizer = SGD(lr=0.01, momentum=0.9)
# Perform a parameter update for each layer/module in the network
optimizer.step(module)
This method updates the model parameters by using the gradients calculated during the backward pass, applying momentum, weight decay, and gradient clipping where needed.
Putting It All Together: Training a Model with SGD¶
Let's use the previously defined Linear layer, BCELoss function, and SGD optimizer to train a binary classification model on some random input data. The process involves a forward pass, a backward pass, and parameter updates using Stochastic Gradient Descent (SGD).
We are going to use make_classification from sklearn. Let's import it and visualize the data.
from sklearn.datasets import make_classification
import matplotlib.pyplot as plt
# Default params
n_samples = 100
features = 2
# Create random input data
x, y_target = make_classification(
n_samples=n_samples,
n_features=features,
n_informative=2,
n_redundant=0,
n_clusters_per_class=1,
flip_y=0,
random_state=1
)
y_target = y_target.reshape(-1, 1)
# Plot the data
plt.figure(figsize=(8, 6))
# Create scatter plot
scatter = plt.scatter(
x[:, 0],
x[:, 1],
c=y_target.flatten(),
cmap=plt.cm.Paired,
edgecolor='k',
s=100,
)
# Title and labels
plt.title("Classification Data")
plt.xlabel("Feature 1")
plt.ylabel("Feature 2")
# Add color legend using scatter's 'c' values
handles, labels = scatter.legend_elements()
# Modify labels to add custom class names
custom_labels = ['Class 0', 'Class 1'] # Custom labels for each class
# Use the custom labels in the legend
plt.legend(handles, custom_labels, title="Classes", loc="lower left")
plt.show()
Output:
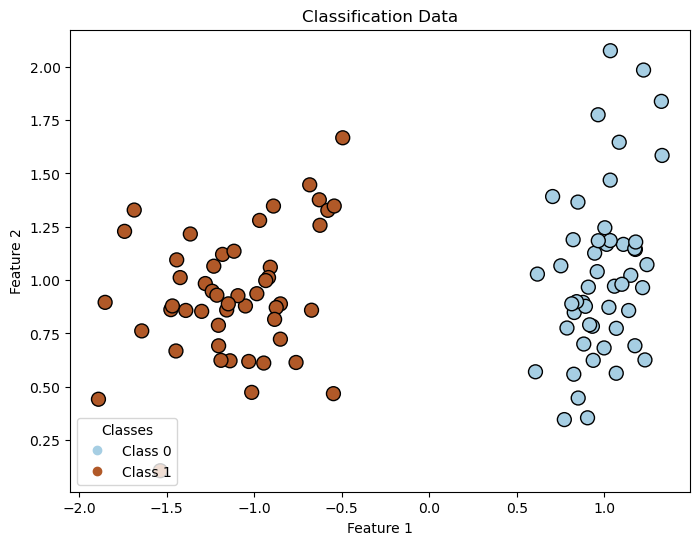
This dataset represents a linearly separable pattern with two classes, which the network must classify. Since data generation can vary slightly, you can experiment by creating and visualizing your own datasets. In this example, we use random_state=1 to fix the data generation for reproducibility, but feel free to change it to explore different patterns.
Also, let's define function for plotting decision boundaries
def plot_decision_boundaries(model, X, y, bins=500):
# Set the limits of the plot
x_min, x_max = X[:, 0].min() - 1, X[:, 0].max() + 1
y_min, y_max = X[:, 1].min() - 1, X[:, 1].max() + 1
# Generate a grid of points
xx, yy = np.meshgrid(np.linspace(x_min, x_max, bins), np.linspace(y_min, y_max, bins))
grid = np.c_[xx.ravel(), yy.ravel()]
# Get the predicted class for each point in the grid
Z = model.forward(grid) # Only get the predicted output
Z = (Z > 0.5).astype(int) # Assuming binary classification
# Reshape the predictions back to the grid shape
Z = Z.reshape(xx.shape)
# Plot the decision boundary
plt.contourf(xx, yy, Z, alpha=0.8, cmap='coolwarm')
plt.scatter(X[:, 0], X[:, 1], c=y.ravel(), edgecolors='k', marker='o', s=30, label='Data Points')
plt.title('Decision Boundary')
plt.xlabel('x')
plt.ylabel('y')
plt.xlim(xx.min(), xx.max())
plt.ylim(yy.min(), yy.max())
plt.colorbar()
plt.tight_layout()
plt.grid(True)
plt.show()
Create the model, activation, loss function, and optimizer:
# Linear layer with 3 input features and 1 output.
model = Linear(input_size=features, output_size=1, init_method="xavier")
# Sigmoid activation
activation = Sigmoid()
# BCE calculate the loss between predicted and actual values
bce = BCELoss()
# optimizer with a learning rate of 0.01, and momentum of 0.9
optimizer = SGD(lr=0.01, momentum=0.9)
Training Loop:
We'll train the model over 10 epochs. At each epoch, we:
-
Perform a forward pass: Compute the predicted output using the model.
-
Calculate the loss using
BCELoss. -
zero_grad before the
backwardstep -
Perform a backward pass: Compute the gradients of the loss with respect to the parameters.
-
Update parameters: Use the optimizer to update the model weights.
Here's the training loop:
n_epoch = 10
for epoch in range(n_epoch):
# Forward
output = model(x)
y_pred = activation(output)
loss = bce(y_pred, y_target)
model.zero_grad()
# Backward
grad = bce.backward(y_pred, y_target)
grad = activation.backward(grad)
model.backward(grad)
optimizer.step(model)
print(f"Epoch {epoch}, Loss: {loss:.4f}")
Output:
Epoch 0, Loss: 0.2021
Epoch 1, Loss: 0.1668
Epoch 2, Loss: 0.1235
Epoch 3, Loss: 0.0893
Epoch 4, Loss: 0.0655
Epoch 5, Loss: 0.0485
Epoch 6, Loss: 0.0361
Epoch 7, Loss: 0.0268
Epoch 8, Loss: 0.0200
Epoch 9, Loss: 0.0151
Almost perfect score! Let's plot the decision boundaries.
Output:
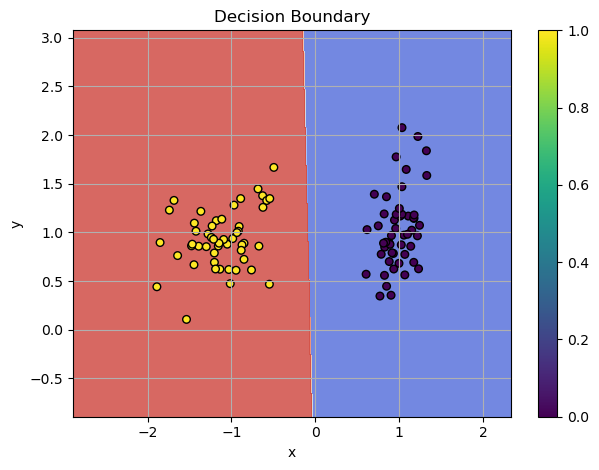
Visualized Boundaries
Sign off¶
We've broken down the fundamental building blocks of training a neural network. The journey starts with forward and backward passes, leveraging gradients to adjust model parameters and minimize loss. By implementing layers like Linear, activation functions like Sigmoid, and optimization algorithms like SGD, we create a system capable of learning from data.
Each component - forward computation, backpropagation, and optimization plays a vital role in ensuring the network trains effectively. The concepts of the chain rule, gradient clipping, and momentum enhance stability and convergence during training.
Together, these elements form the backbone of modern deep learning, providing the tools needed to solve complex problems with elegance and precision. Whether you're experimenting with binary classification or scaling to larger networks, the same principles apply, making this modular approach robust and versatile.