Solving Non-Linear Patterns with Deep Neural Network
The Perceptron, created by Frank Rosenblatt in the 1950s, was one of the first neural networks designed to classify patterns. Initially celebrated, it became a foundational milestone in machine learning.
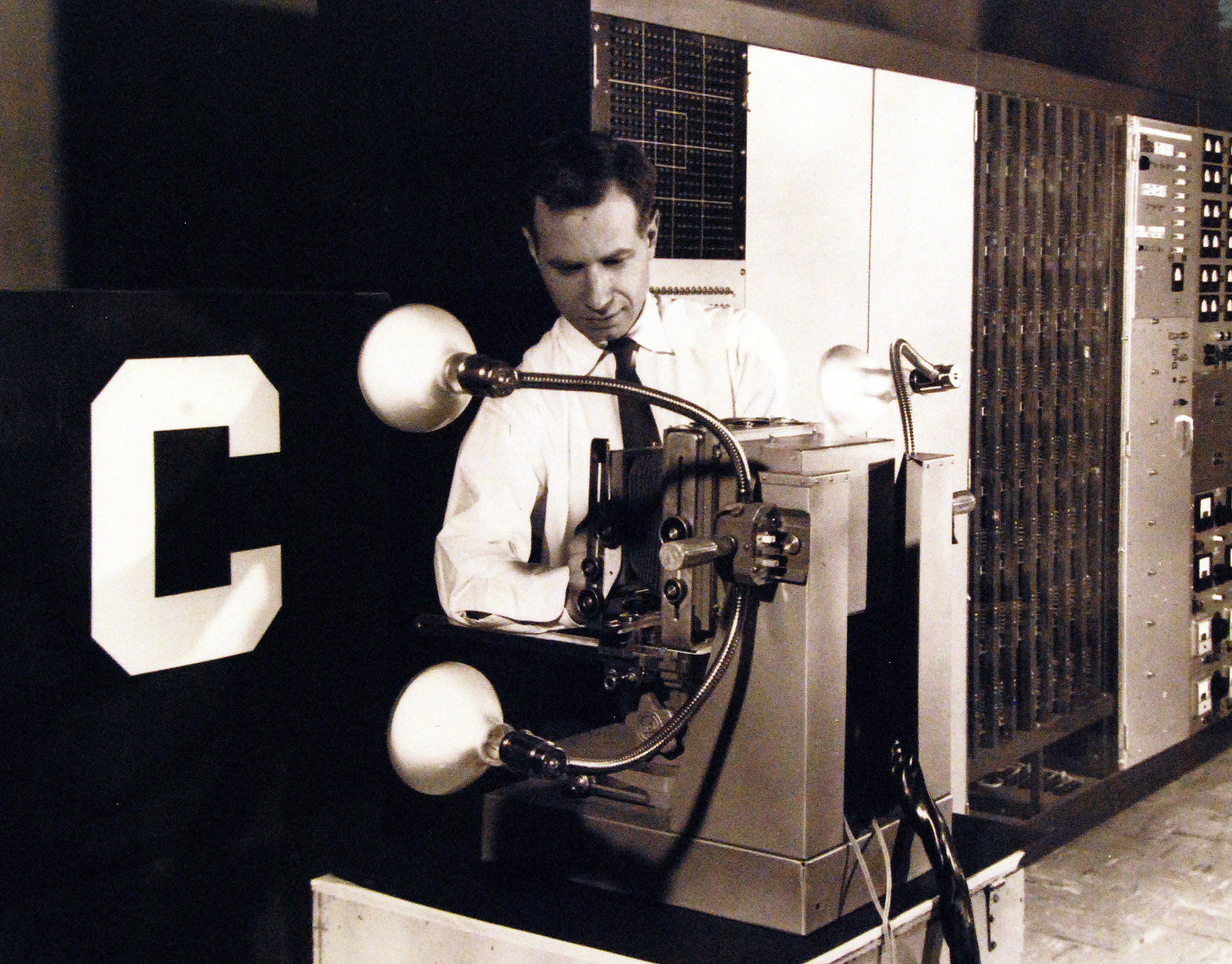
Frank Rosenblatt and the Perceptron, a simple neural network machine designed to classify patterns
Check the jupyter notebook¶
To understand the Perceptron, imagine it analyzing an image of the number "5." Each pixel serves as an input, connected to a weight. The Perceptron calculates a weighted sum, or dot product, between inputs (\(x_i\)) and weights (\(w_i\)):
The activation function decides the output based on this sum:
Here, \(x_0\) is a bias term set to \(1\), balancing the model.
Despite its promise, the Perceptron had a major limitation: it could only classify linearly separable patterns. For example, in 2D space, two sets of points (red and blue) are linearly separable if a single straight line can separate them.
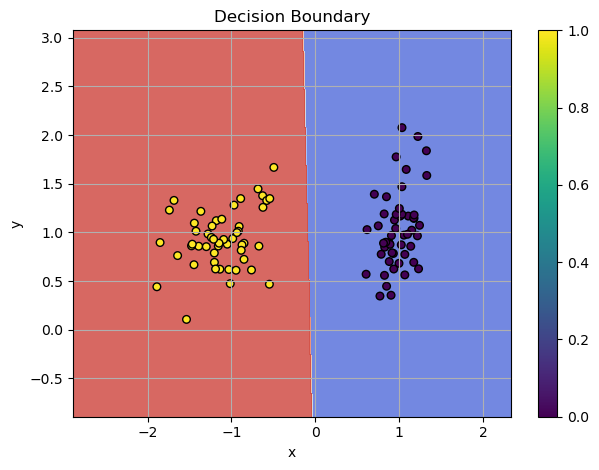
Example: Linearly Separable Pattern
This limitation made the Perceptron unsuitable for real-world problems with complex patterns. In 1969, Marvin Minsky and Seymour Papert demonstrated these limitations in their book Perceptrons.
Perceptrons Book Cover
After the devastating criticism of the Perceptron, the first AI winter began - a time when numerous AI projects lost funding and support leaving them frozen for better days to come. The limitations of early models like the Perceptron highlighted the need for more advanced architectures to tackle complex problems.
In my previous post, I used the Linear Layer as the model for the SGD optimizer. While it successfully handled linearly separable patterns, I can demonstrate that it fails with more complex non-linear patterns. For instance, a single Linear Layer cannot solve the spiral problem - a classic example that requires non-linear transformations.
Spiral Dataset¶
The make_spiral_dataset function generates a dataset of two intertwined spirals, which is a common benchmark problem for testing machine learning models on non-linearly separable data.
import numpy as np
import matplotlib.pyplot as plt
from typing import Tuple
def make_spiral_dataset(
n_samples: int = 100,
noise: float = 0.2,
seed: int = None,
x_range: Tuple[int, int] = (-1, 1),
y_range: Tuple[int, int] = (-1, 1)
):
# Install the random seed
if seed:
np.random.seed(seed)
n = n_samples // 2 # Split samples between two spirals
# Generate first spiral
theta1 = np.sqrt(np.random.rand(n)) * 4 * np.pi
r1 = 2 * theta1 + np.pi
x1 = np.stack([r1 * np.cos(theta1), r1 * np.sin(theta1)], axis=1)
# Generate second spiral
theta2 = np.sqrt(np.random.rand(n)) * 4 * np.pi
r2 = -2 * theta2 - np.pi
x2 = np.stack([r2 * np.cos(theta2), r2 * np.sin(theta2)], axis=1)
# Combine spirals and add noise
X = np.vstack([x1, x2])
X += np.random.randn(n_samples, 2) * noise
# Scale X to fit within the specified x and y ranges
X[:, 0] = np.interp(X[:, 0], (X[:, 0].min(), X[:, 0].max()), x_range)
X[:, 1] = np.interp(X[:, 1], (X[:, 1].min(), X[:, 1].max()), y_range)
# Create labels
y_range = np.zeros(n_samples)
y_range[:n] = 0 # First spiral
y_range[n:] = 1 # Second spiral
return X, y_range
Let's generate an example of the spiral dataset:
# Generate synthetic classification data
n_samples = 500
features = 2
# Usage example:
x, y_target = make_spiral_dataset(n_samples=n_samples, noise=1.5, seed=1)
y_target = y_target.reshape(-1, 1)
# visualize in 2D
plt.figure(figsize=(5, 5))
plt.scatter(x[:, 0], x[:, 1], c=y_target, s=20, cmap="jet")
plt.xlim(x[:, 0].min() - 0.2, x[:, 0].max() + 0.2)
plt.ylim(x[:, 1].min() - 0.2, x[:, 1].max() + 0.2)
plt.show()
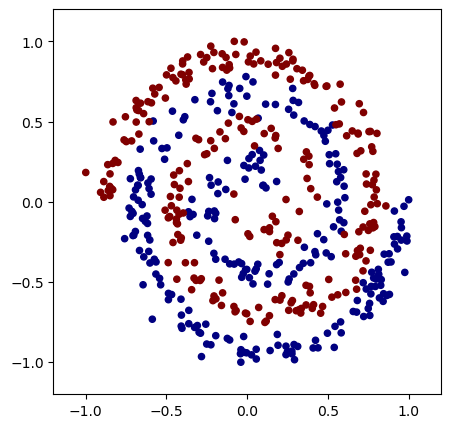
Spiral dataset
Now, we can apply the Linear model to the spiral dataset and observe its performance.
model = Linear(input_size=features, output_size=1, init_method="xavier")
activation = Sigmoid()
bce = BCELoss()
optimizer = SGD(lr=0.01, momentum=0.9)
Training loop for 100 epoch:
n_epoch = 100
for epoch in range(n_epoch):
# Forward
output = model(x)
y_pred = activation(output)
loss = bce(y_pred, y_target)
model.zero_grad()
# Backward
grad = bce.backward(y_pred, y_target)
grad = activation.backward(grad)
model.backward(grad)
optimizer.step(model)
print(f"Epoch {epoch}, Loss: {loss:.4f}")
Output:
Epoch 0, Loss: 0.6395
Epoch 1, Loss: 0.6352
Epoch 2, Loss: 0.6320
Epoch 3, Loss: 0.6317
Epoch 4, Loss: 0.6339
Epoch 5, Loss: 0.6358
...
Epoch 96, Loss: 0.6310
Epoch 97, Loss: 0.6310
Epoch 98, Loss: 0.6310
Epoch 99, Loss: 0.6310
Plotting the decision boundaries reveals that the SGD optimizer is stuck in a local minimum, and the model's complexity is insufficient to solve such a pattern:
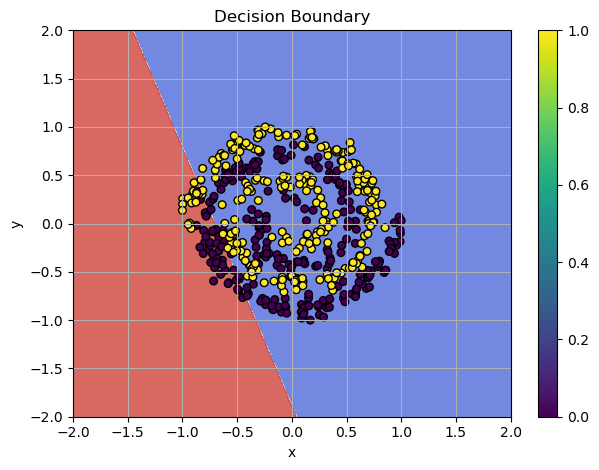
Linear Layer Failed
Using our previously implemented Linear Layer, we train the model for 100 epochs and, there is no meaningful progress - the model is too simple to handle the spiral problem effectively.
Universal Approximator¶
Minsky and Puppet in their book briefly discussed about the multi-layer nets.
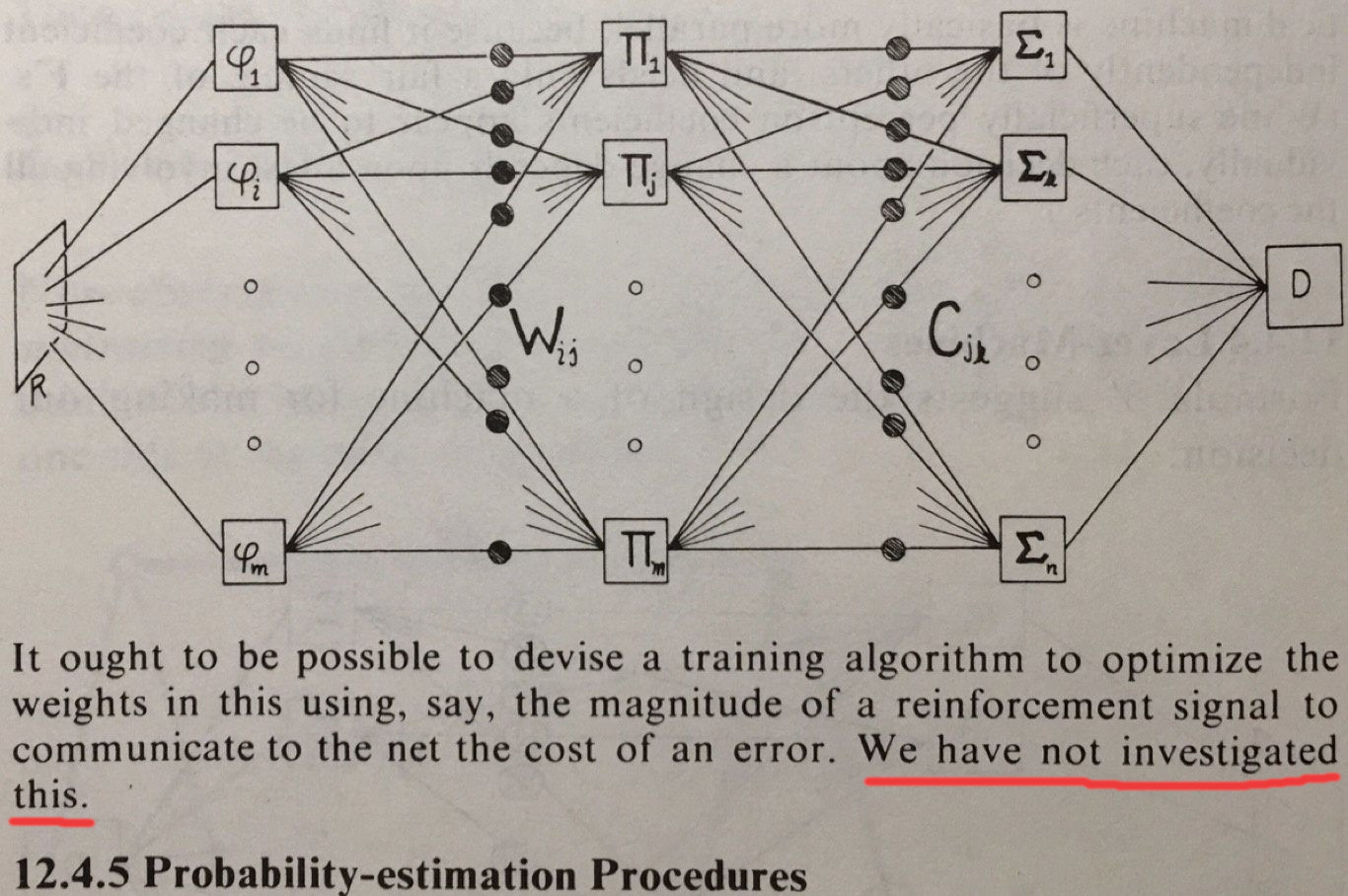
A quote from the book Perceptron about the Multi-Layer Perceptron.
They have not investigated this direction, because back in the day it was barelly possible to build such model, considering the hardware limitation. The cost of the RAM in (1957-1973):
| Date (X) | $/Mbyte (Y) | Date | Ref | Page | Company | Size (KByte) | Cost (US $) | Speed (nsec) | Memory Type | JDR Chip Prices |
|---|---|---|---|---|---|---|---|---|---|---|
| 1957 | 411,041,792 | 1957 | Phister | 366 | C.C.C. | 0.00098 | 392.00 | 10000 | Transistor Flip-Flop | |
| 1959 | 67,947,725 | 1959 | Phister | 366 | E.E.Co. | 0.00098 | 64.80 | 10000 | Vacuum Tube Flip-Flop | |
| 1960 | 5,242,880 | 1960 | Phister | 367 | IBM | 0.00098 | 5.00 | 11500 | IBM 1401 Core Memory | |
| 1965 | 2,642,412 | 1965 | Phister | 367 | IBM | 0.00098 | 2.52 | 2000 | IBM 360/30 Core Memory | |
| 1970 | 734,003 | 1970 | Phister | 367 | IBM | 0.00098 | 0.70 | 770 | IBM 370/135 Core Memory | |
| 1973 | 399,360 | 1973 Jan | PDP8/e User Price List | DEC | 12 | 4680.00 | Core Memory 8KwordX12 bit |
The multi-layer models have the ability to approximate non-linear patterns. This principle lies at the heart of the Deep Learning revolution. These architectures act as a Universal Approximator Function, enabling them to model and learn highly complex relationships in data, thanks to the Universal Approximation Theorem! This theorem proves that a feedforward neural network with at least one hidden layer can approximate any continuous function to an arbitrary degree of accuracy, given the right configuration and activation functions. It underscores the power and flexibility of neural networks in modeling complex relationships in data.
Universal Approximation Theorem (UAT)
Universal Approximation Theorem (UAT) asserts that feedforward neural networks with at least one hidden layer and a non-constant, bounded, continuous, and monotonically increasing activation function (e.g., sigmoid, tanh) can approximate any continuous function on a compact subset of \(\mathbb{R}^n\) to any desired accuracy. Formally, for any continuous function \(f\) and any \(\epsilon > 0\), there exists a neural network \(\hat{f}\) such that \(|f(x) - \hat{f}(x)| < \epsilon\) for all \(x\) in the set.
Deep Neural Network¶
The solution to the spiral pattern problem lies in the Deep Neural Network, which we can easily build using our framework, since we already have all the necessary building blocks! To recall the key components, check out my previous post: Mastering Neural Network - Linear Layer and SGD
First, let's introduce the LeakyReLU activation function, which we will use between the layers. Mathematically, it is defined as a piecewise function:
Here, \(\alpha\) is a small positive constant that controls the slope of the function when \(x\) is negative.
The derivative of the LeakyReLU activation function is:
For positive inputs (\(x > 0\)), the derivative is simply 1, meaning the function behaves like the identity function for positive values. For negative inputs (\(x \leq 0\)), the derivative is \(\alpha\), where \(\alpha\) is a small constant (typically around 0.01), which controls the slope of the function in the negative domain.
Implementation:
class LeakyReLU(Module):
def __init__(self, alpha: float = 0.01):
self.alpha = alpha
def forward(self, x: np.ndarray):
self.input = x
return np.where(x > 0, x, self.alpha * x)
def backward(self, d_out: np.ndarray):
dx = np.ones_like(self.input)
dx[self.input <= 0] = self.alpha
return d_out * dx
The second piece that we need to add is the Sequential class, which allows us to compose multiple layers into a single sequential model. This class facilitates both the forward and backward propagation of data through the layers of the network and makes managing the parameters of all layers in one unified structure.
Here's the code for the Sequential class:
class Sequential(Module):
r"""
A class that represents a sequence of layers, used to build the multi-layer network.
This class allows layers to be stacked in a sequential manner, where data flows from one layer to the next.
It supports both forward and backward passes through the layers, as well as managing parameters for optimization.
Attributes:
- layers (List[Module]): A list of layers that compose the sequential model.
"""
def __init__(self, layers: List[Module]):
r"""
Initializes the Sequential model with the given list of layers.
Args:
- layers (List[Module]): List of layers to be included in the sequential model.
"""
self.layers = layers
def forward(self, x: np.ndarray) -> np.ndarray:
r"""
Performs the forward pass through all layers in the sequence.
Args:
- x (np.ndarray): Input data to the model.
Returns:
- np.ndarray: Output after passing through all layers in the sequence.
"""
for layer in self.layers:
x = layer.forward(x)
return x
def backward(self, d_out: np.ndarray) -> np.ndarray:
r"""
Performs the backward pass through all layers in reverse order.
Args:
- d_out (np.ndarray): Gradient of the loss with respect to the output.
Returns:
- np.ndarray: Gradient of the loss with respect to the input of the first layer.
"""
for layer in reversed(self.layers):
d_out = layer.backward(d_out)
return d_out
def parameters(self) -> List[Parameter]:
r"""
Retrieves all parameters from the layers in the sequence, including weights and biases.
This method appends a unique prefix to the parameter name to differentiate the parameters of different layers
when optimizing.
Returns:
- List[Parameter]: A list of parameters (weights, biases, etc.) from all layers.
"""
params = []
for i, layer in enumerate(self.layers):
for param in layer.parameters():
# Add a unique prefix name for optimization step
param.name = f"layer_{i}_{param.name}"
params.append(param)
return params
Now, let's use the Sequential and compose the Multi-Layer model
# Model architecture
model = Sequential([
Linear(x.shape[1], 128, init_method="he_leaky"),
LeakyReLU(alpha=0.01),
Linear(128, 64, init_method="he_leaky"),
LeakyReLU(alpha=0.01),
Linear(64, 1, init_method="xavier"),
Sigmoid()
])
bce = BCELoss()
optimizer = SGD(lr=0.001, momentum=0.9)
And we are ready to run the training loop:
n_epoch = 1000
for epoch in range(n_epoch):
# Forward
y_pred = model(x)
loss = bce(y_pred, y_target)
model.zero_grad()
# Backward
grad = bce.backward(y_pred, y_target)
model.backward(grad)
optimizer.step(model)
print(f"Epoch {epoch}, Loss: {loss:.4f}")
Output:
Epoch 0, Loss: 0.7561
Epoch 1, Loss: 0.6769
Epoch 2, Loss: 0.6555
Epoch 3, Loss: 0.6653
Epoch 4, Loss: 0.6509
Epoch 5, Loss: 0.6272
...
Epoch 996, Loss: 0.0037
Epoch 997, Loss: 0.0037
Epoch 998, Loss: 0.0037
Epoch 999, Loss: 0.0037
We get almost perfect score! The decision boundaries shows the solutions:
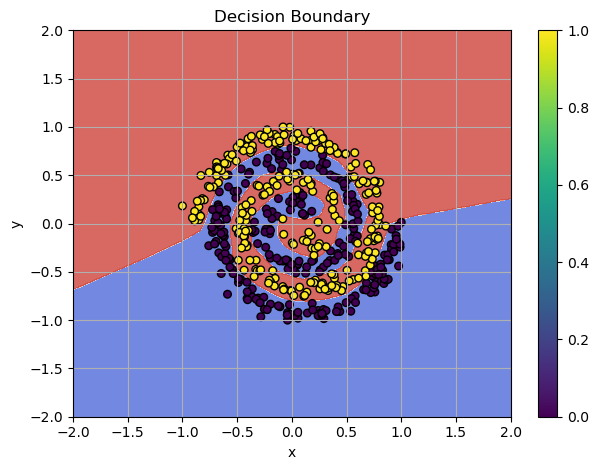
Multi-Layer Model Cracked the Spiral!
The Training Process with animated decision boundaries¶
Sign Off¶
Deep learning has transformed from a theoretical concept to a practical tool, enabling solutions to problems once thought impossible. With the right architectures of the network the potential is truly limitless!